About
Our mission is to bridge the gap between sustainability and scale by providing researchers and farmers with reproducible, lightweight robotics that reduce labour and environmental impact without proprietary dependencies.
The Sowbot Open AgBot ecosystem is designed to bridge the “prototype gap” in agricultural robotics. It provides a Reference Hardware Design that is accessible to startups and is developing a Production-Ready Software Stack that satisfies the rigorous requirements of research.
For startups, this eliminates ~18 months of R&D on the “plumbing” (drivers, networking, UI), allowing them to focus on their unique value (e.g., a proprietary seeding algorithm). For researchers, it provides a stable, repeatable environment where experiments can be shared across labs by simply sharing a Docker image.
Check the Roadmap on Github
Read more about the project aims.
Open Core: The robot ‘brain’

Status: Fabricated – Being tested
A fully open-hardware robot compute unit built around a stackable 10 cm × 10 cm module standard with two Avaota A1 SIngle Board Computers (SBC) connected via a single ethernet cable.
Board A: Control & Safety
Board A is the primary controller responsible for the robot’s physical integrity and movement.
Core Tasks: ROS 2 navigation stack, topological mapping, and EKF localization.
Hardware: Direct serial link to the ESP32 (Lizard firmware) for motor control and safety watchdogs, for deterministic real-time control.
Priority: Executes real-time path planning and emergency stop logic.
Board B: Perception & AI
Board B acts as a dedicated vision processor for compute-heavy tasks.
Core Tasks: Camera drivers, image pre-processing, and neural network inference (e.g., YOLO).
Output: Processes raw video into lightweight detection coordinates or semantic labels.
Priority: High-bandwidth data handling without impacting SBC A’s CPU stability.
Native CAN bus support enables robust field-level communication. Dual GNSS RTK receivers provide centimetre-scale positioning for navigation and task execution.
All schematics, PCB layouts, and firmware are released under open licences. The system is housed in a rugged, waterproof aluminium enclosure with M12 connectors, designed for long-term outdoor deployment.
| Photo | Component | Description | Qty |
|---|---|---|---|
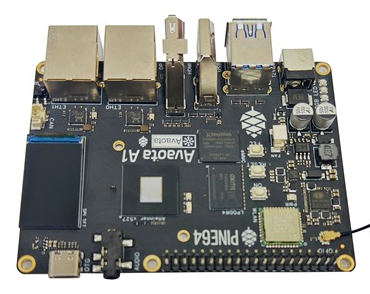 |
Yuzuki Avaota-A1 SBC |
Octa-core 64-bit ARM Cortex-A55 (up to 1.8 GHz), 4 GB RAM, integrated AI accelerator. Open-hardware platform. | 2 |
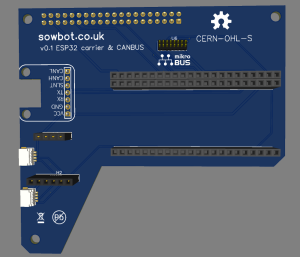 |
ESP32-S3 Microcontroller |
Carrier board for ESP32 for Real-time Lizard control node and general-purpose peripheral I/O on custom open hardware PCB. | 1 |
 |
BNO085 IMU |
Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout – BNO085 | 1 |
 |
CAN Bus Breakout |
CAN interface breakout for deterministic, vehicle-grade communication. | 1 |
 |
SparkFun GNSS RTK, Cheaper Copies |
High-precision GNSS positioning with RTK support. | 2 |
 |
Tri band GNSS antenna |
Antennas for RTK | 2 |
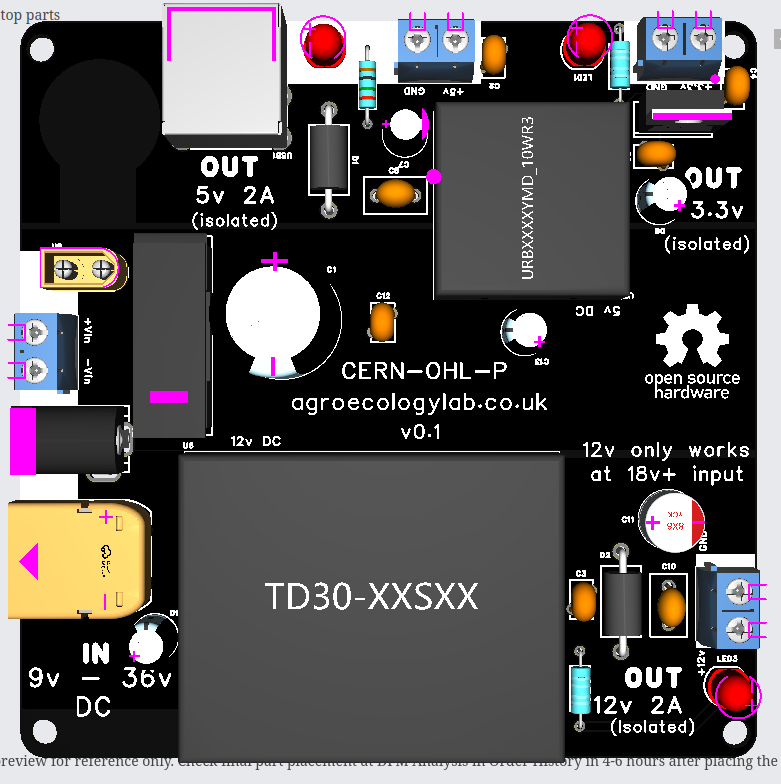 |
36V → 12V & 5V Power Conversion & Isolation |
Custom-fabricated power regulation and electrical isolation board. We can supply these for ~£30 | 1 |
 |
Simple mount plate |
10cm x 10cm mount plate with 20mm holes. We can supply a pack of five of these for £10 | 1 |
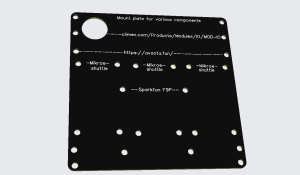 |
Avaota/RTK mount plate |
10cm x 10cm mount plate with holes for components. We can supply a pack of five of these for £10 | 1 |
 |
Waterproof Aluminum Enclosure |
Sealed aluminum enclosure with M22 connectors for rugged deployments. | 1 |
 |
22mm Estop/Switch |
22mm estop/switch | 1 |
 |
Cable for switch |
Cable to connect to estop | 1 |
 |
22mm Cable glands Or 90 elbow |
22mm x 1.5mm Cable glands | 1 |
 |
Cable blank cap |
22mm Cable blank | 1 |
 |
XT60 inline fuse |
XT60 inline fuse | 1 |
| DC barrel splitter |
Power two Avaota | 1 |
List of Aliexpress brain components
Sowbot: The body
Status: BOM in review pending move to tracked platform(s)
The Open core module above powers the Open AgBot reference platform. This integrates high-performance motors, precise control, long-lasting batteries suitable for Low temp <0C charging and rugged suspension into a fully modular, open-hardware agricultural robot.
Modular chassis and standardised connections enable rapid expansion and reconfiguration, providing full control over electronics, software, and mechanics for a versatile, field-ready system.
Note we are mid-pivot to a tracked platform
| Photo | Component | Description | Qty |
|---|---|---|---|
| Odrive CAN Bus Drivers with (Open hardware version, in development) Migration to SimpleFOC hardware planned | High-performance motor control with real-time CAN communication for precise torque and speed regulation. | 2 | |
| Nema 34 Odrive D6374 |
Odrive motor in Nema34 format | 2 | |
 |
12V 80Ah Sodium-Ion Battery Packs |
High-capacity energy modules providing long-duration power for fully autonomous operation. | 6 |
| Nema 34 gearbox |
Ratio TBC | 2 | |
| 5mm aluminum sheet & 3d print spacing components |
CNC cut |
4 | |
| 68cm tracks |
TBC | 2 | |
 |
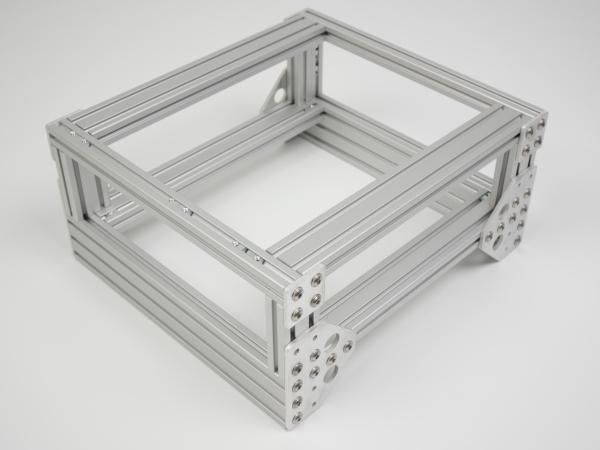
Chassis Connectors |
Aluminium 90° crossover and modular pipe fittings used to join tubing at right angles for structural frames. | Many |
For prototyping the commercial TR500S may be suitable
Sowbot Mini
(dev platform)
Status: Needs assembly and testing
A 1/3 scale development platform for testing and validation
| Dev platform Components | Description | Quantity |
|---|---|---|
| Driver, Gearbox & motors as full size platform above | As above | 1 |
| Tracks | Lynx tracks Or cheaper |
2 |
| Chassis structure | 1515 extrusion |
many |
| Chassis connections | 1515 corner | Many |
Sowbot Pico
(dev platform)
Status: Requires some Lizard firmware work, but physical platform tested with alternate software

Track issue here
Under review/ testing in light of move to tracked chassis
| Photo | Component | Description | Qty |
|---|---|---|---|
| 12V 37RPM DC Motor |
DC 12V, 37RPM output, high-torque speed reduction gearbox Reversible via polarity swap. with encoders ~$12US | 2 | |
| 3S Lipo |
DC ~11.4V, 6000MaH or largest capacity you can afford ~$25US | 1 | |
| 2 | |||
| Chassis |
Undergoing testing | 2 | |
| 3S USB lipo charger |
Charger for battery ~$5 | 1 | |
| 1 | |||
| Zio 4-Channel DC Motor Controller (Qwiic) |
Dual H-bridge bidirectional motor controller supporting 4 DC motor outputs (2 independent channels), 2.5–13.5V supply, 1.2A continuous / 3.2A peak. I²C Qwiic-compatible for easy daisy-chaining. Supports CW, CCW, brake, and stop modes via PWM. $14 | 1 | |
| XT60 > Screw terminal |
XT60 male > Screw | 1 | |
| 22 AWG PH 2.0 cable |
PH 2.0 cable | 1 |
